
CLUE researchers shine at CTRF 2022

CLUE researchers were in the spotlight, presenting a total of nine CLUE research projects at the 57th Annual Conference of the Canadian Transportation Research Forum, CTRF 2022, “Transportation and Supply Chains in Unprecedented Times,” June 12-15, 2022 in Montreal.
Research presented was carried out at University of Toronto under the supervision of Professor Matthew Roorda, and at York University under the supervision of Professor Mehdi Nourinejad, Professor Kevin Gingerich, and Professor Peter Park.
Contributing researchers are Usman Ahmed, Tufayel Chowdhury, Dr. Jason Hawkins, Dr. Tho V. Le, Ruowei Li, Kianoush Mousavi, and Shang Zhang from University of Toronto, and Adonai García, Ucchas Saha, Artem Solovey, and Yashar Zarrin Zadeh from York University.

CTRF 2022 Session 3.3 Yashar Zarrin Zadeh (Photo: Adonai Garcia) 
CTRF 2022 Session 5.2 Tufayel Chowdhury (Photo: Tho V. Le) 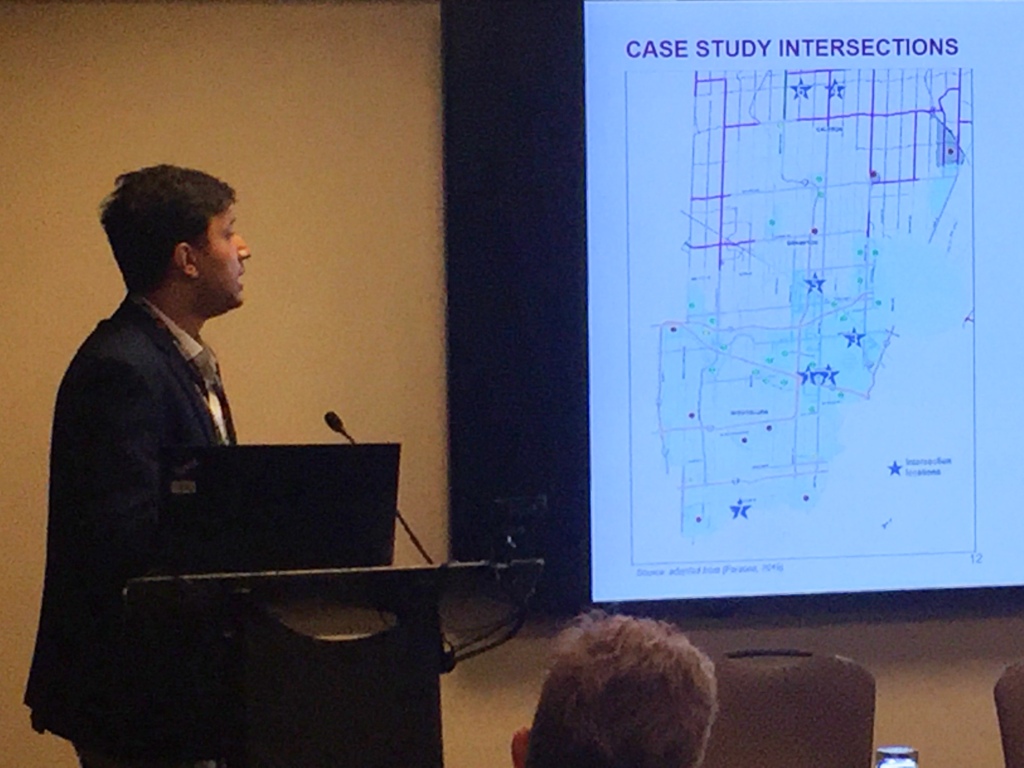
CTRF 2022 Session 5.2 Ucchas Saha (Photo: Tho V. Le) 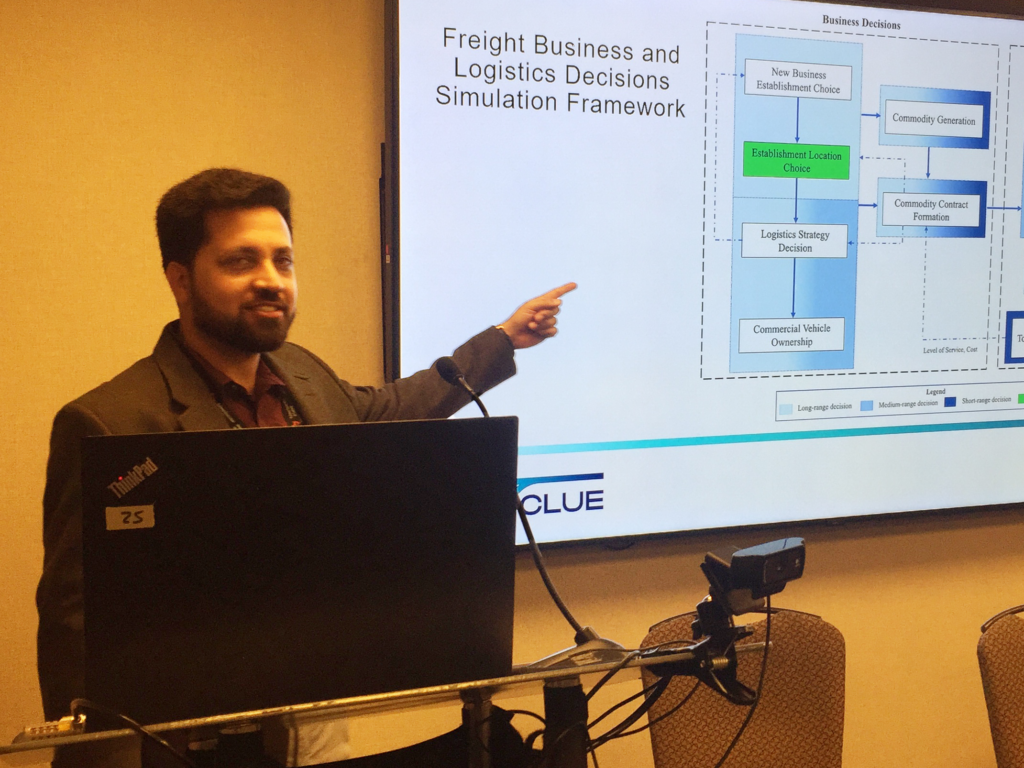
CTRF 2022 Session 5.2 Usman Ahmed (Photo: Tho V. Le) 
CTRF 2022 Session 5.3 Artem Solovey (Photo: Tho V. Le) 
CTRF 2022 Session 5.3 Ruowei Li (Photo: Tho V. Le) 
CTRF Session 6.3 Adonai Garcia (Photo: Tho V. Le) 
CTRF Session 6.3 Matthew Roorda (Photo: Tho V. Le)
CLUE presentations at CTRF 2022
- Establishment Location Choice Model Considering Firm Membership. Usman Ahmed (presenter), Jason Hawkins, Matthew J. Roorda.
- Abstract: Location choice is an important decision made by business establishments which has broad regional impacts. In this paper, the authors focus on the problem of establishment location choice of wholesale and retail trade establishments. They consider the membership of establishments in a firm, which owns multiple business establishments. They find that establishments from the same firm tend to locate farther from each other and co-locate with other establishments from the same industry. This highlights a gap in existing methods of analysis, and the authors propose location choice models that could represent such dynamics.
- Stated Preference Study of Trucking Carrier Route Choice Behavior in Ontario. Yashar Zarrin Zadeh (presenter), Kevin Gingerich.
- Abstract: Research on commercial vehicle route choice with a focus on market toll pricing and user willingness to pay is needed to inform strategies that balance mobility and sustainability. A shortlist of the most influential factors was identified in this study including travel time, delay, distance, and toll cost. These factors were then incorporated into the generation of an efficient stated preference (SP) survey on routing decisions. The SP survey was complemented with a questionnaire to collect socio-economic/demographic information. An online survey was designed and distributed to Ontario trucking companies. The results of this survey are used to calibrate mixed multinomial logit models estimating the probability of route selection for trucks. The findings indicate heterogeneity in truck route choice for time and cost where, on average, they are willing to pay up to $81 (2020 CAD) to save one hour of their travel time.
- Freight Vehicle Type and Shipment Size Modelling Using Discrete Choice Methods. Usman Ahmed (presenter), Matthew J. Roorda.
- Abstract: The authors in this paper investigate the relationship between vehicle type and shipment size as sequential or joint choices, and identify the behavioural factors that affect these choices. They compare sequential and nested logit models to represent the choice process with both possible sequence (or nesting) structures i.e., vehicle type first (upper level) shipment size second (lower level), and vice-versa. Their research finds that both sequences and nesting structures can be reasonably applied to these choices, in addition they find that a joint model structure may also be suitable based on the strong correlation found.
- A National Agent-Based Carrier Selection Model. Tufayel Chowdhury (presenter), Colin Smith, Maren Outwater, Matthew J. Roorda.
- Abstract: The selection of motor carriers by shippers is a key logistics process that needs to be properly represented in a behavioral freight model. Typically, such choice decisions are implemented using a random utility maximization (RUM) – based approach like multinomial logit models. This is not often feasible due to data limitations and because attributes like carrier reputation, service quality, etc. cannot be simulated in an agent-based microsimulation model. This paper provides an overview of a heuristic algorithm that addresses these limitations. The model has been implemented in a national agent-based freight microsimulation model platform for the United States. A high-level analysis of the model result is included in this work. Some policy applications of the model are also discussed.
- A Swept Path Analysis of Intersection Designs for Long Combination Vehicles. Ucchas Saha (presenter), Kevin Gingerich, Peter Park.
- Abstract: This paper focuses on the range and combination of geometric factors leading to successful Long Combination Vehicles (LCVs) right-turn movements, such as curb radii and lane widths. Swept-path simulations are conducted for seven intersections in the Region of Peel using AutoTURN software to classify scenarios as pass or fail. Binomial logit models are estimated from these results. The correct prediction rates of the models range from 74% to 97%. Then, a quick-response toolkit is developed to assist roadway authorities with the LCV route acceptance process.
- Optimization of Hybrid Ride-Sharing with Passengers and Freight. Artem Solovey (presenter), Mehdi Nourinejad, Kevin Gingerich.
- Abstract: This paper proposes a matchmaking algorithm that enables ride-sharing services for dual delivery of people and packages to a single destination. The algorithm utilizes Benders Decomposition to solve the problem due to added complexity of the dual system. The algorithm is applied to a university student community travelling to the York University Keele Campus and is expected to eventually replace a passenger only ride-sharing system. This paper shows how a rideshare company can adopt this algorithm to increase its potential earnings by maximizing profit with constraints to ensure increased utility for all users. In addition, the improved efficiency arising in the transportation system is expected to provide broader contributions to social, economic, environmental, and technological sustainability.
- Performance of Person-Following Delivery Robots in Crowded Pedestrian Environments. Ruowei Li (presenter), Tho V. Le, Matthew Roorda.
- Abstract: The aim of this study is to assess the performance of a person-following robot in indoor environments with high pedestrian density. A variety of laboratory experiments are conducted to determine a person following robot’s operating parameters, such as maximum speed, acceleration, and following distance, under different contexts of maximum robot speed, robot movement trajectory, and presence of pedestrians. The movement of the robot and its leader is recorded by a system of indoor ultrasonic positioning devices. Parameters estimated from the experiment data will provide ground truth for calibrating a simulation model of robot behaviour in a pedestrian environment. The insight gained from this study will supply quantitative evidence to help logistics companies.
- Electric Cargo Cycles and the Capacitated Vehicle Routing Problem with a Single Depot. Adonai García (presenter), Kevin Gingerich, Mehdi Nourinejad.
- Abstract: Electric Cargo Bikes (ECBs) are commonplace in European countries such as the Netherlands but have not been widely adopted yet in North America. For logistics companies, electric cargo bikes are limited by their payload weight and subsequent battery range. This paper produces a formulation of the Capacitated Electric Cargo Bike Routing Problem (CECBRP) to provide a case study for companies interested in shifting their conventional fleet to an environmentally friendly alternative. The model is implemented using Python code to test various patterns and intensities of customer demand and determine how many bikes are required to fulfill all deliveries and pickups. There is an emphasis on analyzing the distance from customers to the depot. A numerical example is presented to demonstrate the model and analyze the feasibility of various vehicle models and capabilities.
- Community Noise Survey for Off-Peak Delivery in the Greater Toronto Area. Shang Zhang, Kianoush Mousavi, Matthew Roorda (presenter).
- Abstract: One of the main concerns regarding Off-Peak Delivery (OPD) programs is the adverse effect of noise from delivery activities on residential communities during the evening and night time hours. To assess the OPD impact on the community noise level in the Greater Toronto Area (GTA), the authors conducted a noise survey to collect responses from residents in the vicinity of 22 retail stores that receive considerable deliveries in off-peak hours. The survey aims to collect information regarding the noise sources and their frequency by the time of day before and during the pandemic. The results from the 327 responses indicate the overall noise reduction since the beginning of the pandemic. Furthermore, the results from the responses near the off-peak delivery sites show no clear evidence of the OPD activities’ adverse effect on the noise level compared to the control group.
About CTRF
The Canadian Transportation Research Forum (CTRF) is a non-profit association of transportation professionals operating since 1965 which aims to promote the development of research in transportation and related fields and provide a forum for networking and discussion.